Yet Another Raspberry Pi Cluster
The slides of a lecture/presentation on 2016-03-20 @ Chemnitzer Linux Tage
Christian Prior
Slides available
http://www.helotism.de \ ⏎
/business/marketing/presentation/CLT_2016-03-20
Content of today's presentation
[Maker] CNC, CAD&CAM development boards power supply [SysAdmin] Config Mgt monitoring [Data Analysis] data provider visualization [Documentation]Helotism
Wiktionary.org: Helotism (zoology): A form of mutualism in which one species is forced to perform tasks for another, for their mutual benefit.The Goals

- keeping up with IT changes
- solid Linux sysadmin skills are the foundation for "Big Data"
- getting most out of these boards
- getting ahead of the complexity curve
The Roadmap
The Repo
https://github.com/helotism
- all-in one repo
- hardware
- software
- promotion
- Issues welcome! ;)
TOGAF: Architecture Development Method
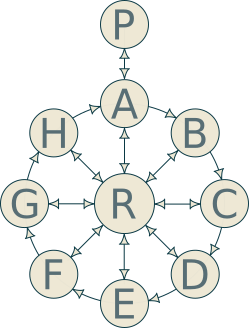
- P Prerequisites
- A Vision
- B Business Plan/Action
- C Information System Plan/Actual
- D Technology Plan/Actual
- E Opportunities and Solutions
- F Migration Planning
- G Implementation Governance
- H Change Management
- R Requirements
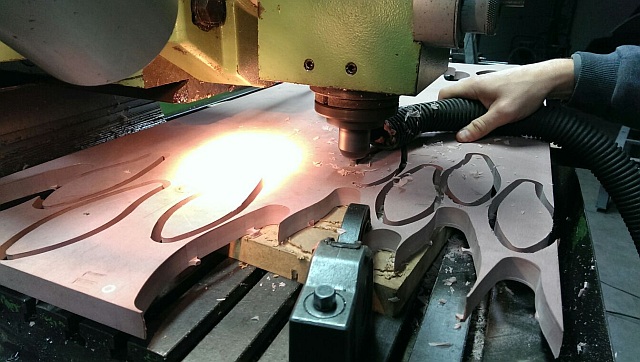
Enthusiast's Small Batch Manufacturing





Development Boards
The market for development boards is confusing: https://en.wikipedia.org/wiki/Comparison_of_single-board_computers is a good overview.Dimensions
-> see repo
Minnowboard
UEFI